Addtronics Preliminary Design Report Presentation Title Slide
This week the Addtronics team took on the second round of preliminary design report (PDR) presentations (our presentation title slide is featured in the picture above). After incorporating feedback from our peer-reviewed presentation the previous week, we were able to update our PDR presentation as well as our report to include information that was perspicuous as well as inclusive of all of our research and progress so far. After these changes were implemented, we presented our PDR to our sponsor, Florida Power and Light, to emphasize the work we have accomplished so far and our plan moving forward.
Besides preparing for our presentation, we have finalized the drawings for the mock box and have built it this week! The mock box will serve as a substitute transformer pad to be used for testing when we begin the testing phases of our integrated design. Being the same dimensions as the transformer pad we wish to open in the field, it will give us a good estimate for the success of our design and will give us the opportunity to solve any challenges we had not yet considered. Check out our mock box in action in the video below!
Next week we look forward to exploring more features and testing even more specifications as well as beginning to plan and build our prototype.
Mock box that will be used as a test transformer pad (song: Hey Bulldog – The Beatles)
This week Addtronics has been pertinaciously working on advancements on every aspect of the quadruped project and we are very excited to share our substantial progress.
Firstly, we started our week off strong by successfully finishing our preliminary design report (PDR) and preliminary design report presentation. The report itself contained detailed information about the development of our product so far like concept generation tables, technical performance specifications, diagrams, completed items, upcoming tasks, and project goals. The presentation gave an overview of this information and a broad description of the problem statement that our project hopes to solve. Our team was very united for this presentation, color coordinating our business casual outfits by wearing black (not pictured but refer to Back In Black – AC/DC playing in the back of the following video). Most of all, we had a fun time sharing our current progress with everyone and we rocked it!
Now for the part you’ve all been waiting for…. testing updates! This week we were able to meet with the company who created the quadruped and have their input as we worked on controlling the quadruped from a laptop using ROS commands rather than the given controller. In the video below, we are able to send basic commands and control quadruped motions like crouching and rotation in all directions. This gives us a good foundation for efficiently controlling the robot through an external interface and how it can be improved.
Initial ROS Quadruped Commands (Back In Black – AC/DC)
We continued testing by having a quadruped payload test where we tested how much weight the quadruped was able to carry. This will help us determine if the quadruped can hold the weight of the arm while still functioning adequately, how much strength the quadruped is able to lift, and an ergonomic position where the payload is maximized. After trying different weight distributions and lifting configurations, we determined that the payload was maximized by beginning lifting from the crouch position when the weight was centered. In this condition, we tested the quadrupeds movement once it had lifted the weight, reaching a maximum weight of 30 lbs adequately.
In preparation for next week, we will review and edit our PDR presentation and present it to our sponsor. In preparation for arm payload testing, we have done an ergonomic lifting analysis of the arm and have determined the most essential factor to consider is the center of gravity offset in the configuration the arm is lifting. In order to maximize payload, we need to minimize center of gravity offset as much as possible. These initial steps give us a good idea of what to expect and be efficient in our arm payload testing.
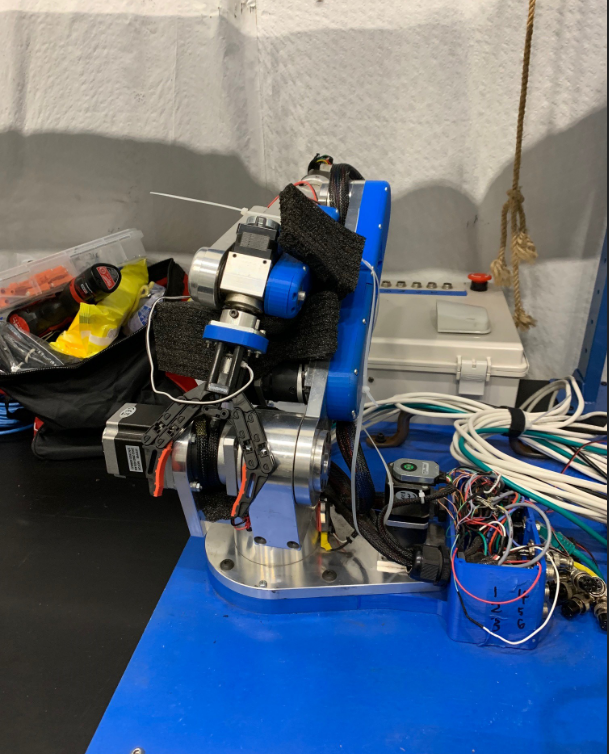
Following from the previous week, Addtronics has continued testing extensively. We were able to obtain joint movement of the robotic arm and will now begin doing payload tests for both robots to finalize some specifications in our designs for integration. Additionally, we continued exploring different methods for controlling the quadruped to help in considering the specifications of the user interface. As we advance in our research and development phase, we have built preliminary designs for a mock box structure for testing as well as a rough 3D model of our overall integrated design. This rough 3D model was a component in the product architecture that we completed this week which highlights the main components of the design and how the will be integrated with each other.
Aside from that, this week our team was able to meet with a stakeholder who represents the main users of the final product. We were able to ask about some of the current techniques used in the field and the challenges associated with them. This helped us get a better understanding of what these individuals encounter in real world scenarios and how we can help mitigate those issues and incorporate their preferences as well.
This week Addtronics made significant progress in both organization and physical testing. In terms of organization, we completed a project roadmap specifying the timeline in which we plan to complete major parts of our project, including time for modifications and roadblocks. Additionally, we prepared a first month report for our sponsor and coach to communicate our progress so far and our future plans using visual aids like decision matrices and detailed figures.
Additionally, a couple of members from our team completed their tool room training this week and got straight to work on building the test pen for the quadruped (pictured above). The test pen was specifically designed to mitigate risk associated with testing the software and hardware of the quadruped to avoid any harm to the users, the quadruped, and it’s surroundings. Aside from testing the quadruped, we also began testing the arm and trying to control it on a higher level. While there is still more testing to be completed, our preliminary studies have given us great insight on certain issues we will need to address.
As promised last week, this week our team headed out to the field with our liaisons to demo our robotic dog for the first time! While focusing on safety, we were each able to practice controlling the dog and test out different scenarios. In this way, we were able to identify some advantages and disadvantages of both the hardware and software that could only be determined through user experience. After walking the dog, we had a thorough meeting with the developers of our robotic dog, our liaisons, and coach to address specific challenges we might face to accomplish the desired features. This meeting gave us great perspective on the priorities and niche of knowledge of some of our key stakeholders and how we can best meet all their wants and needs in the scope of the project.
Continuing from last week, we further narrowed our brainstorming concepts with more robust specifications in mind. As we continue setting up the building phases of our project, we’ve addressed some of the risks and how we can mitigate them, as well as developed a timeline of when milestones will be completed to ensure progress. As we look forward, our team members will begin their equipment training to begin designing and building our test structures.
Continuing from last week, the Addtronics team has firmly determined key aspects of the project such as stakeholders and their wants and needs. From this information we’ve been able to create a thorough and organized document containing critical requirements and specifications. These requirements and specifications have been ranked in order of importance using a house of quality table that has been reviewed by our liaison to determine any specifications that were missing or unnecessary. Identifying these points has been fundamental for guiding us as we consider new ideas through our brainstorming process.
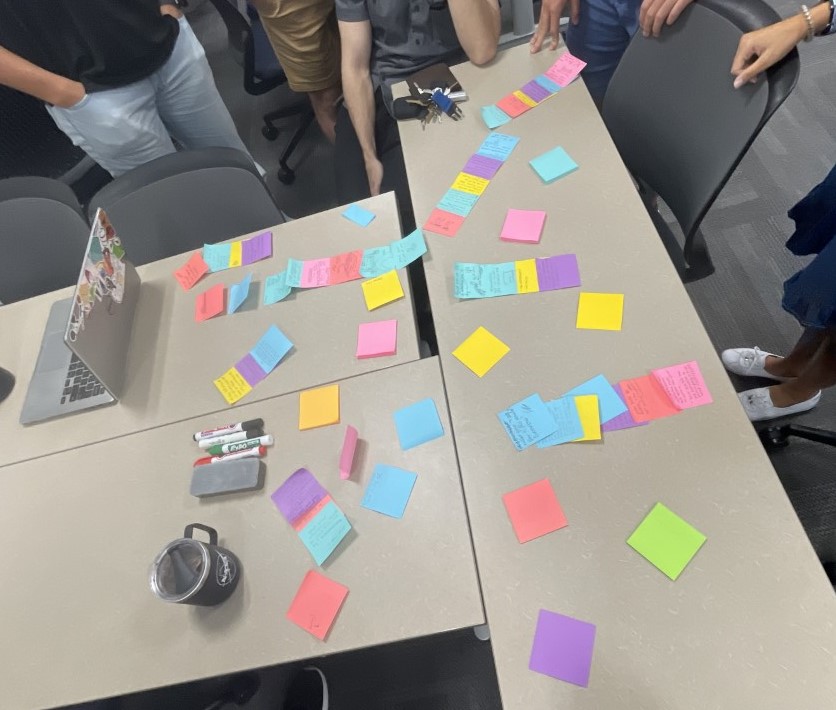
As pictured above, this week our team has taken a deep dive into research and brainstorming possible solutions for the major problems in our project. Our initial brainstorming session consisted of each team member developing an idea to solve an aspect of the problem and writing it down on a sticky note. We then passed our sticky note to the person on our right to build on that idea and continued until we received back our original idea. In this way we incorporated a “yes and” approach where we all collaborated with each other and expressed our ideas fully. Afterwards we sorted the concepts into similar categories and began discussing their feasibility. Next week, we will continue to narrow the plethora of ideas that surged through our brainstorming sessions.
Aside from brainstorming, we have been extensively reviewing the documentation available for the technology we will be using (robotic dog and arm). Next week we look forward to having a physical demonstration of the robotic dog and begin developing tests to verify we can meet the project requirements.
As we end another exciting week of our project, we have finalized our team’s name and logo! A formal hello from the Addtronics team (check out our logo above). Our interdisciplinary team is composed of seven senior engineering majors who are highly interested in innovation using robotics. Our team’s main goal this semester is to seamlessly integrate two separate robots to jointly complete a task.
This week we’ve assigned specific tasks to each team member according to their discipline, and have discussed which area of the project each team member will be focusing on. For this week those tasks have mostly involved research on the available technology and determining how we can best meet the project requirements. After preliminary research and meetings with both our coach and liaison, we will begin planning tests to quantitatively evaluate whether our current technology is sufficient for the task at hand.
Aside from this, we’ve begun to efficiently work together and have established a functioning team dynamic.
Feel like you’re right on campus with us in the new engineering building! https://www.eng.ufl.edu/facilities/general-services/facility-reservations/neb/
As the first group of students returning back to campus after being virtual throughout the pandemic, Addtronics has begun their project journey with FPL! In these initial weeks, our team has spent some time familiarizing ourselves with each other and with our scope of work. We have discussed all of our skills and how we can each contribute to our project to make it not only functional, but innovative. To help familiarize ourselves more with our project we’ve held meetings with both our coach and liaison and have begun to ask them questions to help us have a clear understanding of the needs and wants of the project and how we can exceed them.
We’ve identified tasks and key features that each discipline on our team can begin researching. Next week we will begin brainstorming and discussing our individual ideas and how they will work together. We will meet with both our coach and liaison team to make any adjustments and improvements before moving on to the next phase of our project.
Want to know a little more about us? Make sure you check out the “Meet This Team” tab to get to know our team!