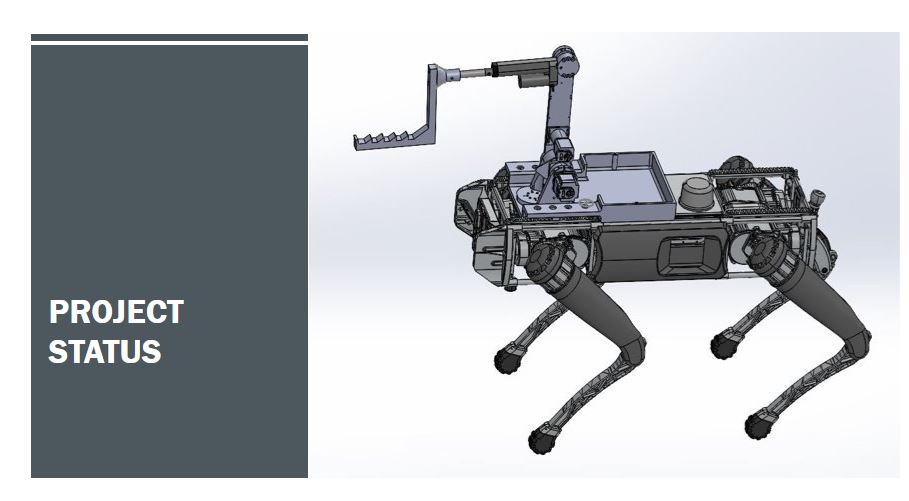
This week the Addtronics team prepared and presented for qualification review board 1 (QRB1). This presentation served to communicate our progress so far as well as our next steps. We received a lot of very useful feedback that will be considered as we continue realizing our design. The presentation included updates regarding the new electronics set up, testing of the motor controllers, new 3D printed interface design, and 3D printed adapter parts for the linear actuator that were mentioned in last weeks blog post.
Updates
Additionally, we have created a GUI that has been deployed to a smartphone to facilitate controlling the motors (seen right). We have also finished printing the new interface which has now been mounted onto the quadruped. Moving forward we plan to conduct extensive testing of individual systems such as the arm motor reliability, arm payload, and network to ensure these components function individually. Afterwards we plan to conduct more cohesive tests such as lifting the weighted mock box lid and quadruped maneuverability test.