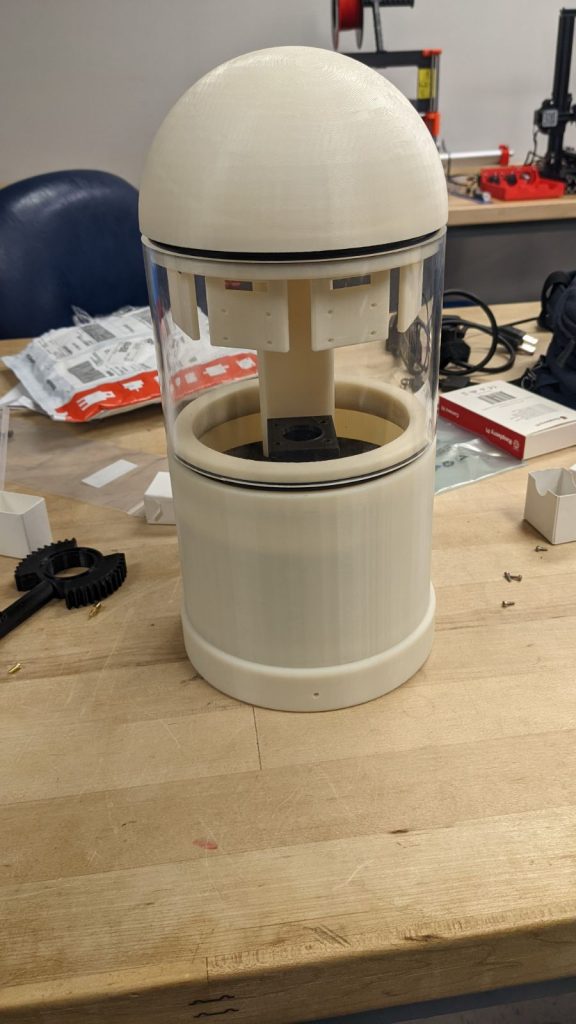
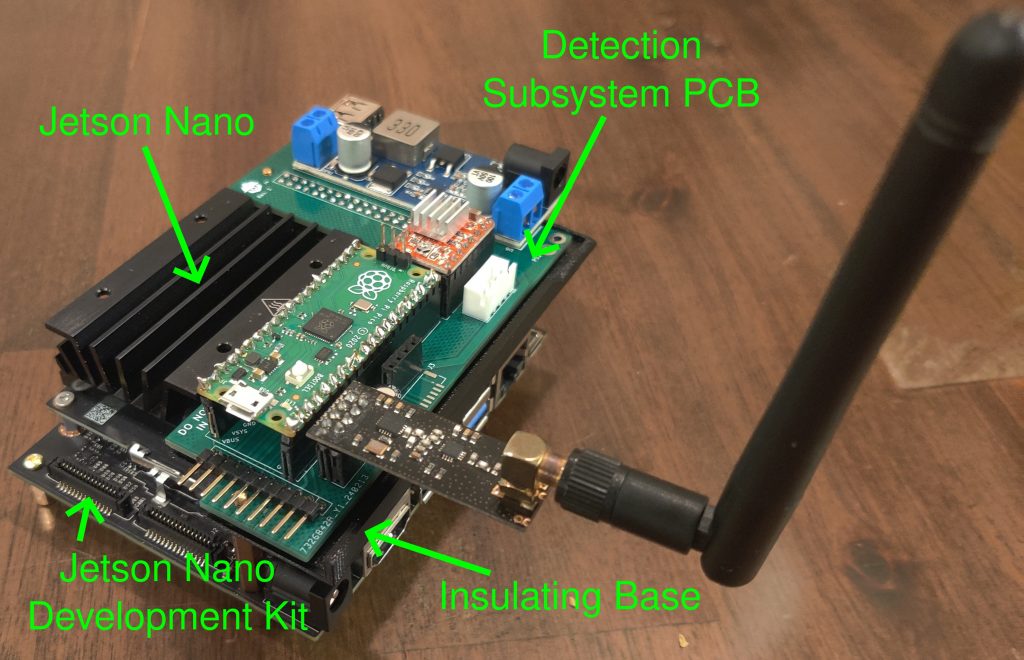
After nearly an academic year of work on our project, we have finally made it to the Final Design Review, or FDR. The event started out with a demonstration of our prototype to our engineering liaisons, Kyle Bush and Kevin Seymour, which went well. Unfortunately, a wire on the LiDAR was broken, which meant that we could not show it off at that time; however, we quickly soldered on a new connector at the venue to get the prototype functional. After this, we attended a keynote presentation on the experience of professional engineering, which was followed by a very polished project presentation from this year’s best team, Desigators. Next, teams went to their assigned rooms to present their projects to an audience of the other teams in the room and those teams’ liaisons and coaches. We were matched with Crystal Clear Waters (sponsored by Duke Energy) and SolarSafe (sponsored by NextEra Energy, who is the parent company of our sponsor, FPL); the room’s theme seemed to be utility companies. Our team’s presentation went very well, and we stayed in the time constraint and were able to answer all questions. Finally, we returned to our prototype (see the image below), and the public was invited in to inspect the projects. With our LiDAR system and alert system working, our project had some interesting (and loud) interactive components. We ended off the event with a conversation with Kyle, who was very happy with the progress that we had made on our project.
We here at the RoadWatch team want to thank you for following our project over this past year, and wish you all well. We hope our experience can inspire future engineers to take IPPD and have similar experiences developing their own projects. It has been a pleasure updating you weekly with our progress. Go Gators!