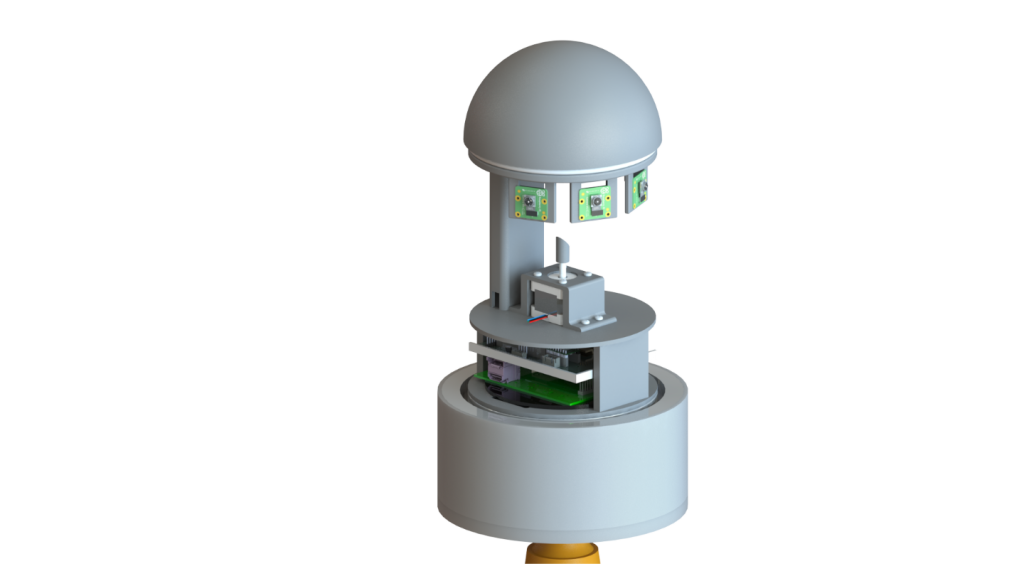
With the feedback from QRB2 in mind, and the Prototype Inspection Day (PID) rapidly approaching, there are only so many weeks left (two to be exact, plus spring break) before we have to present a fully integrated and working model of our system. Therefore, we have no time to waste on project development. Fortunately, we have some progress to report for this week. Substantial progress was made this week on the electronics of both the Detection and Alert systems; the Detection PCB was revamped to correct previous errors and to add new features, and the Alert PCB nears completion. They will hopefully both be ordered this weekend. Additionally, progress was made on our stereo vision pipeline, and some models were identified which could perform some critical stages. Prototyping was successfully performed on the shell of the Detection system enclosure (see the figure below for a model of what this looks like). Finally, a technique for predicting the future position of vehicles with constant position was successfully developed. Next week is the UF Spring Break, so unfortunately there won’t be a new post. However, check back in the following week to see how our project has further progressed.