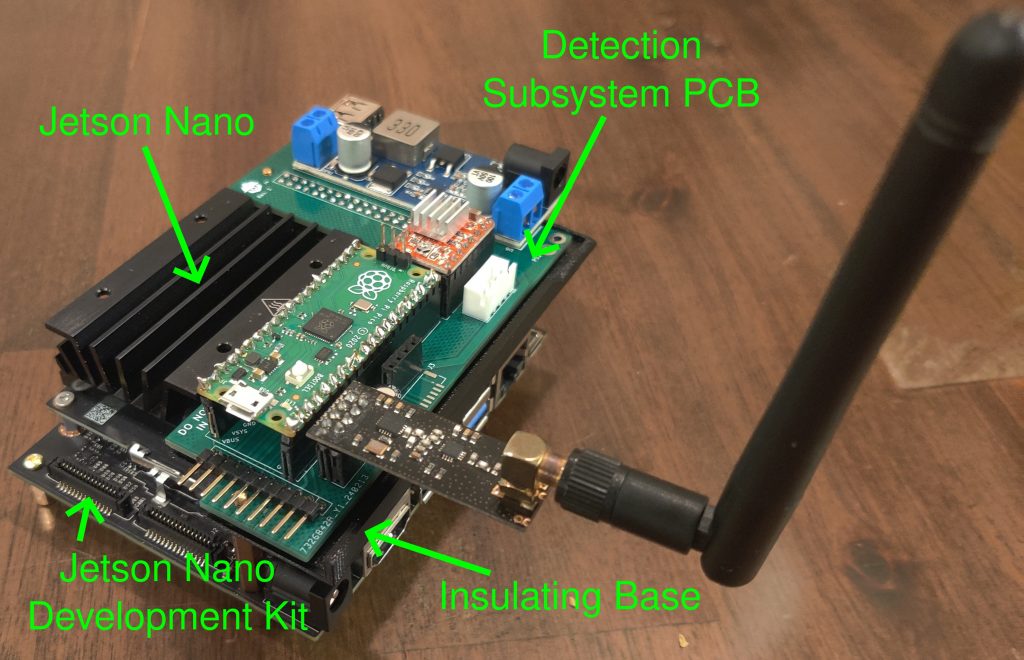
This week, the Road Watch got ready for its second Qualification Review Board, QRB2. As discussed previously, the QRB is an event where we present our project’s progress to a panel of expert faculty and receive feedback on our project. In particular, the presentation of and feedback on project risks are important, as these will dictate the success and failure of the project. Fortunately, after these weeks of work, we have plenty of meaningful progress to show the panel. For instance, we have made substantial progress on a fully-integrated prototype of our detection subsystem (see the image below) and are eager to share this. Additionally, we have developed a new architecture for the camera vision algorithm, which we are interested in getting feedback on. We also have some anticipated risks to share, such as our uncertainty about our system’s predictive capability and the potential for thermal regulation issues. Be sure to follow up next week to read about the results of the QRB2 event.