Our final presentation video consists of two different demos. One of the demos includes the obstacle avoidance demo and the other one is the dancing robot. Our team received very good feedback and is grateful for the semester
Our final presentation video consists of two different demos. One of the demos includes the obstacle avoidance demo and the other one is the dancing robot. Our team received very good feedback and is grateful for the semester
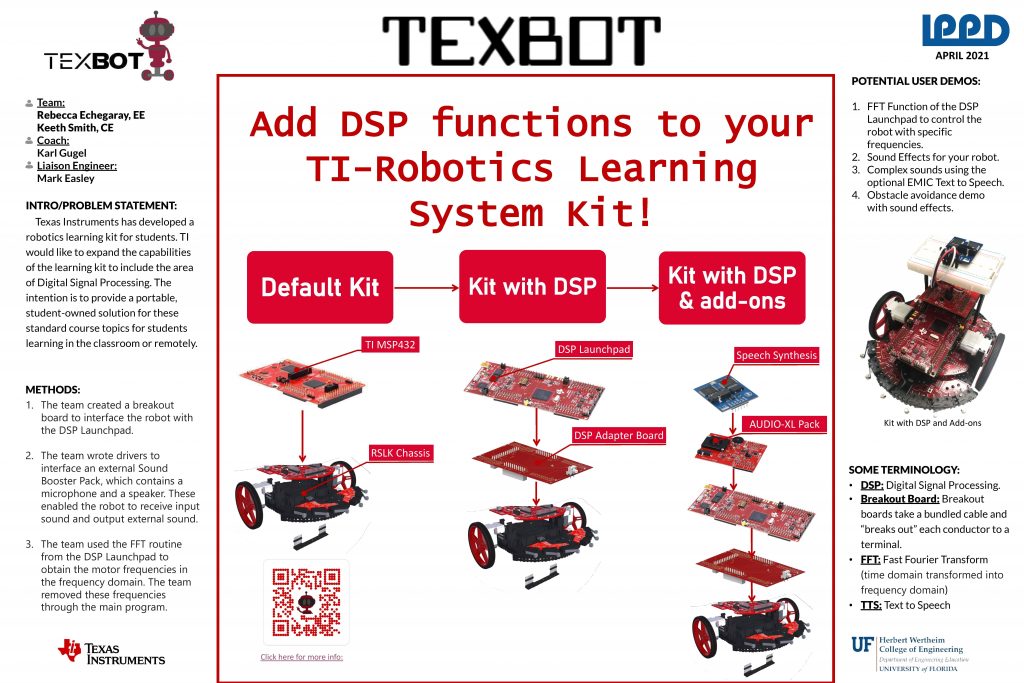
After a meeting with the Texas Instruments liaison we have reached a final agreement on how the final demo will look like. The final demo will include 3 different demonstrations of the robot. The first one will be the obstacle avoidance demo without any additional components. The second one will be the Audio Booster Pack Demo with the input control and output simple sounds. The third one will be the Text to Speech Demo with the Audio Booster Pack demo combined. These three demonstrations will showcase the many possibilities to use a DSP with your TI-RSLK Max.
We completed our obstacle avoidance demo and will present it to the judges this week on prototype presentation day. This demo utilizes our tachometer, motor, and sensor drivers to provide the robot with instructions to bump into an object and then navigate around it to continue down a straight-line path. Because this is only a demonstration program to show our utilization of RSLK features, obstacle avoidance only works for rectangular objects.

This week we created a demo using the Emic2 TTS (text-to-speech) chip. We were able to integrate the chip into our already existing obstacle avoidance demo. This enabled our robot to speak and say the action it is performing while it does it. This will be a huge addition to our project and the necessary code to run th demo will be provided in the github repository.
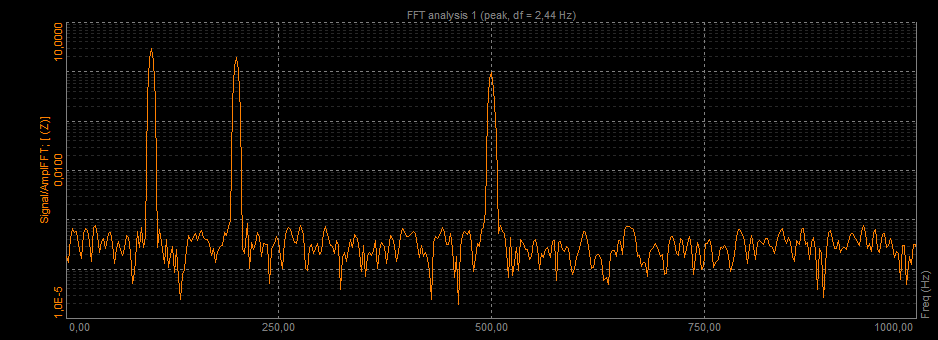
In the past weeks the team has been working on the capability to control the start and stop of the robot program using sound. For this, it was important that the microphone recognizes only the user’s voice rather than the surrounding voices. To address this issue, the team decided to implement a digital filter using an Fast Fourier Transform that will get the frequencies inputted by the microphone. Once we see a pattern of the surrounding frequencies (including the ones from the motors) we are able to specify a specific number and make the robot start or stop at a specific frequency with the sound of a whistle.
In order to display the capabilities of the DSP Launchpad. The team would like to include more complex sounds in the demo showcase. These sounds would use a Text to Speech chip that contains various algorithms allowing for more sounds when the robot moves, backs and hits the bumper switches. The team is currently in the process of wiring this chip and interfacing it with the DSP Launchpad.
This week the team was able to present a preliminary demo utilizing the new PCB board, the Audio Booster Pack and the motors in the robot. The program starts once a sound is inputted through the microphone. The demo displayed three different sounds according to which bumpers are hit. Once the bumpers are hit, the robot rotates at different angles left and right. This demo showcased the PCB and how it successfully adapts the usage of the PCB.
This week we are working on the demo for the last presentation of the semester. Last week we designed and ordered our second PCB iteration and made minor changes to the design by adding LEDs to make up for the pins lost in RSLK horizontal header. This PCB will be incorporated in our demo and enable us to debug efficiently. The demo will utilize the IR LED sensors and change the color of an RGB LED on the top of the DSP depending on if the surface is black or white. The demo will also utilize the microphone on the AUDIO-XL booster pack and halt the robot for a few seconds anytime the input goes above a certain threshold. To incorporate the motors and bump sensors, we plan to have the robot move forward until it hits a wall at which point it will backup and turn 45 degrees in the opposite direction of the wall and continue on.
The team met with a group of judges to revise our timeline and make sure we are staying on track. We got great feedback and we are planning to implement their recommendations in our future presentations 🙂
Over the past few weeks, our team designed the first iteration of the prototype PCB that will connect the TI-RSLK with the DSP Board. We sent the design to a PCB supplier to be printed and we received it, soldered, and tested it. This will allow the creation of the demos to be smooth and easier.