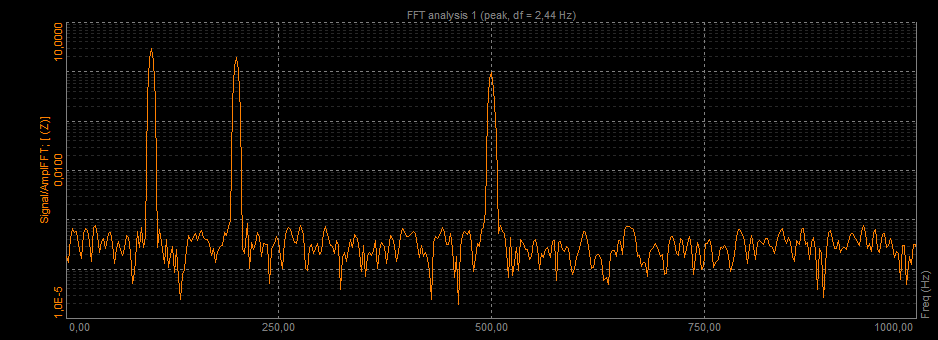
In the past weeks the team has been working on the capability to control the start and stop of the robot program using sound. For this, it was important that the microphone recognizes only the user’s voice rather than the surrounding voices. To address this issue, the team decided to implement a digital filter using an Fast Fourier Transform that will get the frequencies inputted by the microphone. Once we see a pattern of the surrounding frequencies (including the ones from the motors) we are able to specify a specific number and make the robot start or stop at a specific frequency with the sound of a whistle.