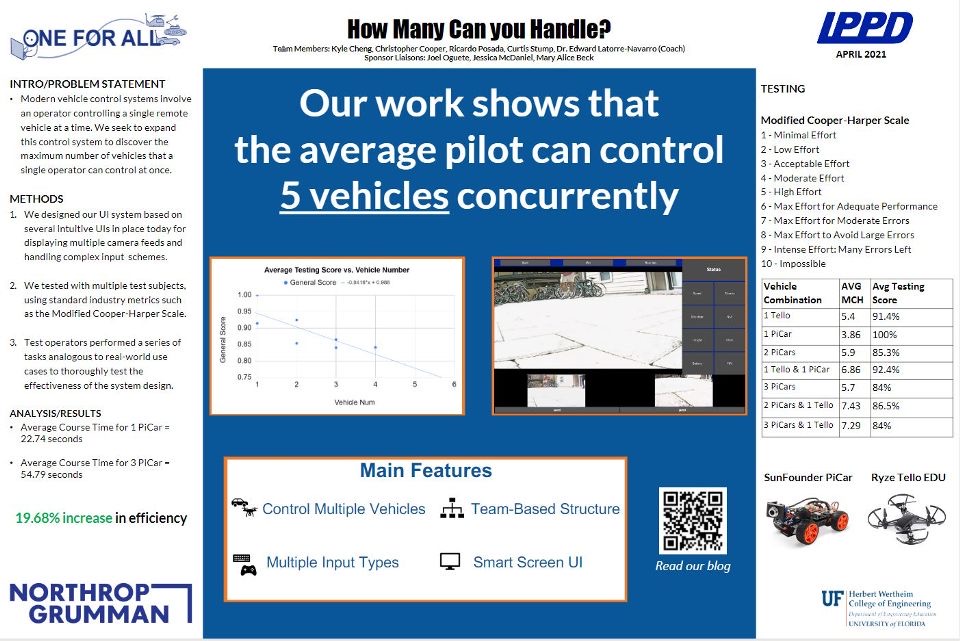
This previous Tuesday (4/20/2021) the One For All team was able to show off the work they accomplished this year to Northrop Grumman, peers, and family. The team did the FDR presentation took the safe precautionary methods to have this event in person amidst the pandemic. Above is a picture of the poster the team used for the presentation. Throughout the course of the year the One For All team learned how to be a professional engineer and its members are excited to take this into their post graduation life.

Here is a photo of the team presenting in the Reitz Union. Thank you to IPPD for a great year!