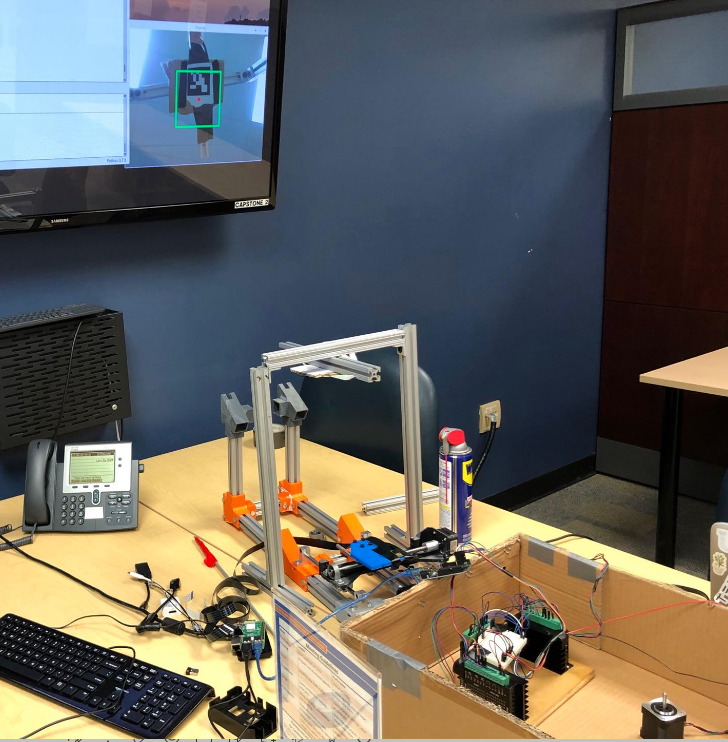
The team has entered into a month solely focused on development. So far we have been able to do a complete redesign and build of the structure frame. After testing the first frame, we determined that we needed it to be more rigid but also more modular. With the structure frame built, the next part of the structure design will be to build a ramp for the structure and a dock for the robot. The charging team has been hard at work improving the CV algorithm and code that will make the charging unit move. As of now the team has been able to control all the motors necessary to move all axis of the charging unit. As with all new technology, the team has to learn about how to program a robotic quadruped. The robot is now able to perform certain tasks autonomously after a user command. Stay tuned for more next week!