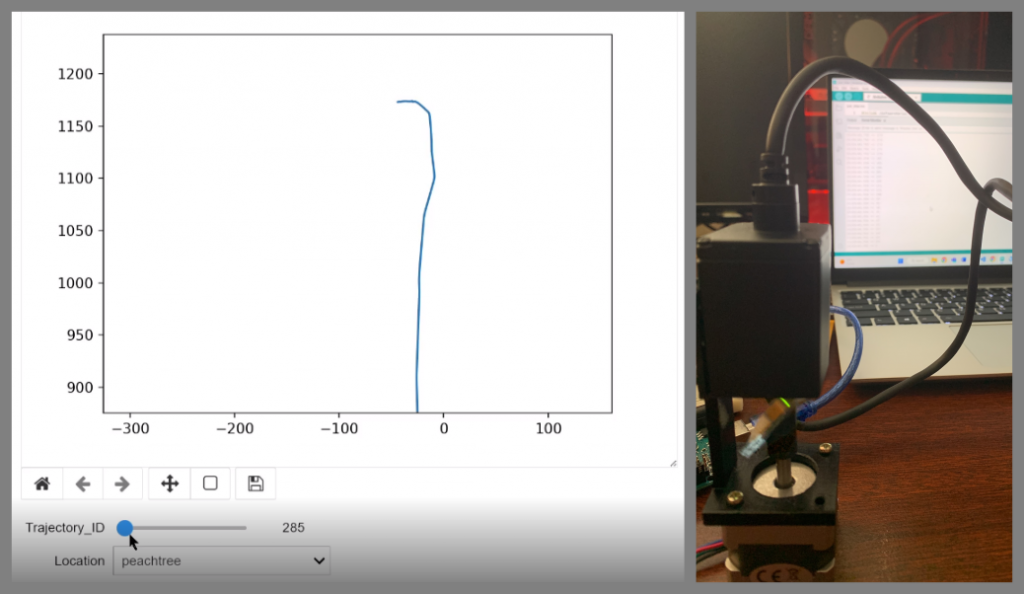
Based on feedback from QRB1, the Road Watch team decided that it is imperative to have a fully working prototype of all non-AI aspects of the project. This essentially means everything must be working in an integrated system, with the exception of the predictive algorithm and the computer vision system. Thus, substantial progress has been made this week towards this goal. For instance, Darrion and Skyler successfully implemented the 1D to 2D LiDAR conversion process, and have all mechanical, electrical, and software components working in tandem to provide a 2D scan of an area. Will also made substantial progress on the Detection Subsystem PCB, and will be ordering it later this week. Billy and Rolando have been busy sourcing many of the electrical components required for our system. Finally, Evan was able to extract vehicle trajectories from the NGSIM dataset, which will be necessary for training the predictive algorithm. Next week, we have been given the whole class period to do more project work, so be sure to check in next Friday to see how our collaborative prototyping efforts pan out.