The team has finally completed the drone platform, with all critical components connected. This leads the team to prepare for their first test in the Malachowsky Drone lab. This is critical to staying on track with the project, since there are benchmarks to getting to full autonomous flight. There are also multiple steps to getting the LiDAR sensor module working in tandem with the platform while flying, which is an important step we need to take. However, we are trying to ensure that each step forward works full to ensure we do not need to go backwards if things go wrong.
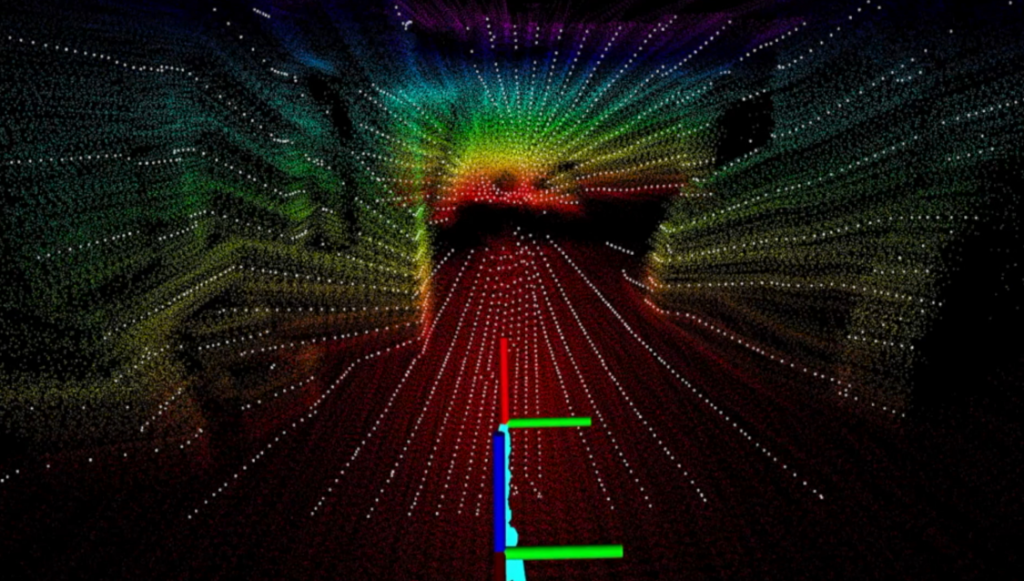
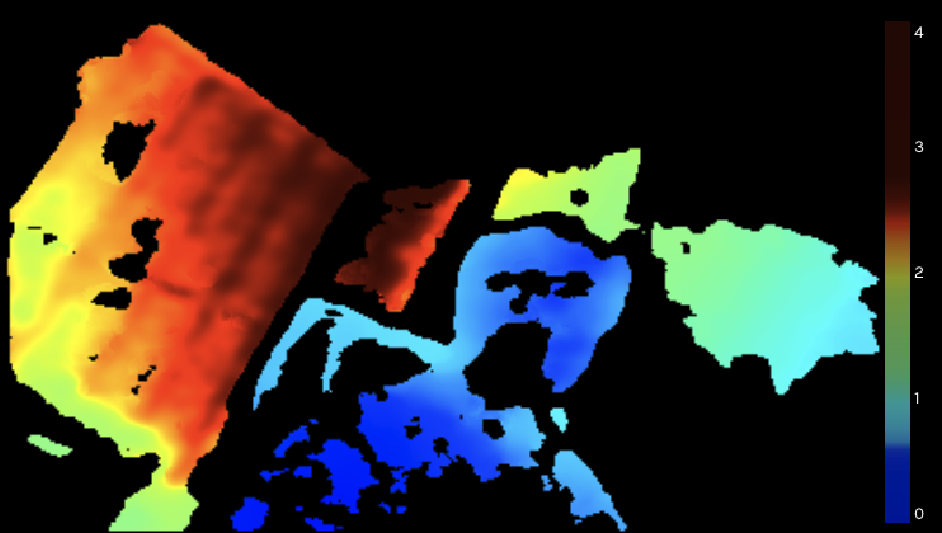
The team has made significant progress on gathering data via the LiDAR component we will strap to our drone. The picture above shows a still image of a scan that was collected of Library West, and then mapped to software using a SLAM algorithm that uses LiDAR data only. This is very significant as the proof-of-concept exists and the next steps are to simply get the software running on the target platform we expect to use. The team expects to begin the handheld testing of their drone platform soon before getting the software platform integrated with the drone.
This week, the team presented to the QRB board about the status of their project! They gained very good feedback about their progress, learned about some issues with their component purchases. Based on this, the team is reevaluating the need to reorder components, but will continue to push forward with drone construction despite these setbacks. Speed is of upmost importance now, and we want to make sure that we can make as much progress as possible to be ready for the final presentation.
As the semester begins to ramp up it’s pace, the team is dedicating time to picking up where they left off in the design process. There is still lots of work to do, so the team has been spending more time planning out the final stretch of this project to get a better picture of what they are going to do. The goal is ideally to be able to put our heads down and work hard until the final presentation of the course and meet most of the expectations we set forth. Stay tuned as the team continues to push through all the challenges that come their way!
Gatormatix is back and ready for the new year! We have returned from the holidays, and today marks the end of the first week of classes. The team has spent time this past week regrouping and redefining the action plan for the semester. Next week, the team will meet with the liaisons to discuss the current state of the project and discuss all remaining tasks.
This week, Gatormatix began to wrap up the first semester of IPPD by presenting our SLDR.The presentation went well, and positive feedback was achieved. The team also got to listen to two other presentations. Following this, the team sent out the SLDR response memo. As we move into the last few weeks of the semester, testing will continue, with stability and FEA analyses driving design changes.
This week, Gatormatix presented their SLDR under the viewing of peers. The presentation went very well, and each team member is looking forward to incorporating the feedback received for the upcoming event.
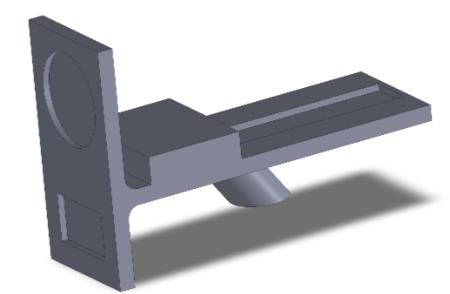
The drone mount has undergone major changes and has reached iteration three, in which the idea is to have the mount above the drone to prevent obstruction of the LiDAR FOV. This is something that is currently being investigated and decided upon. The drone itself has had discussions of being reduced to a quad-copter for efficiency purposes– math pending confirmation.
A few key components of our drone have arrived and testing began immediately. The visual SLAM algorithm is still undergoing testing and iteration.
The project is on track, and the team is looking forward to another week of hard work and progress.
This week, Gatormatix has focused on drafting and further completing the SLDR in preparation for the presentation on Tuesday. Each team member has begun work on their respective parts and progress is continuing steadily.
A few changes have been made to some core components of the drone. First, the LiDAR configuration originally chosen was replaced with a newer, 3D point cloud LiDAR. The team is very excited to work with this component due to its great capabilities. Furthermore, the flight controller is being revisited, due to a sharp increase in price of the previously selected one. This is a decision that is ongoing.
Visual SLAM algorithm testing is underway, and will be implemented in full with the arrival of LiDAR. This progress is concurrent with hardware upgrades such as the frame of the drone and the mount. CAD models are being constructed and stress analyses will ensue to ensure the drone is proper. The team is very excited to get hands-on testing with components that are arriving soon.
The project is on track, and the team is looking forward to another week of hard work and progress.
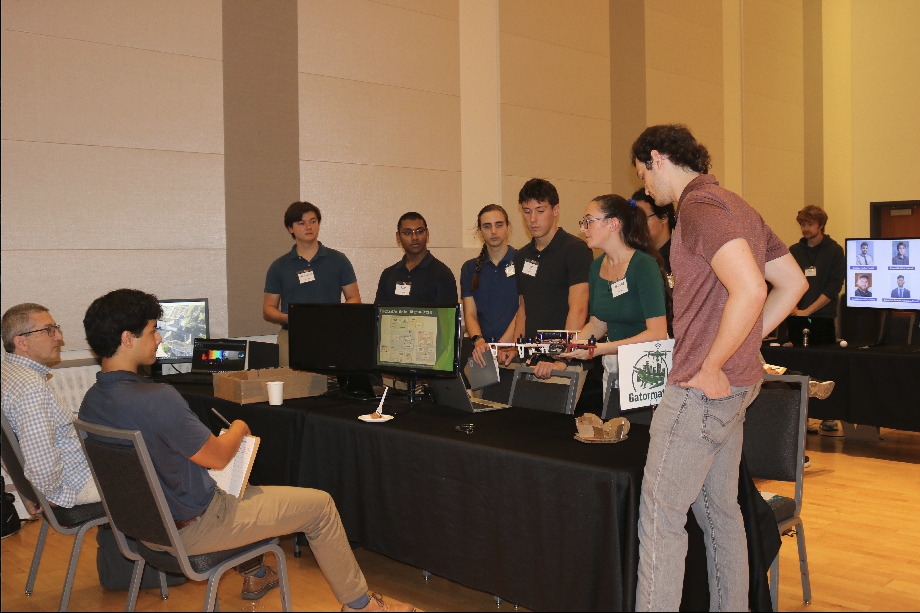
This week, Gatormatix presented their prototype at Prototype Inspect Day (PID)! We as a team received very valuable feedback from all the judges during our presentations. Showing off our drone body as well as the different subsystems of our drone platform was very insightful to not only us but also to the people around us. Our project complexity has made it essential for our multifaceted team to split up into different groups, with software and hardware teams. Although we still very much work together, seeing our project come together was extremely interesting and a good checkup for moving forward.
Most of the criticism received during PID were suggesting on how we should navigate our project. Practically all the judges had expertise in mechanical (or related) field, so most of the feedback received was along those lines. We have a few notable actions we are planning to take moving forward based on feedback. First of all, we were recommended to simplify the project as much as possible and start ordering parts soon. Although our project is very complex, testing subsystems is going to be crucial to understanding how parts work, and ordering parts will be necessary for testing. We are also going to make a CAD model of our prototype, as it will be necessary for SLDR, and it will be good for testing and presenting. The next significant research items will be cameras and LiDAR. We want to find the right type of camera for our use case, and we are under the impression that 2D LiDAR might not be powerful enough to solve our problem. We are all doing extensive research on the topic to gain enough proof.
Great testing has been done for our prototype presentation. A SLAM demonstration was shown at PID which was valuable for judges to understand what exactly it is. A LiDAR sensor was set up with live feedback to its software outlining the box it was in perfectly. A cardboard example of the sensor platform was also created for us to have a better understanding of how we are going to assemble the sensors in order to make our project fly! Overall, great progress has been made, and we look forward to another week of working together!
This week, Gatormatix has been focusing on getting ready to present for Prototype Inspection Day (PID) on Tuesday. Getting our hands on a drone body, LiDAR, and other hardware components has given us the ability to have a semi-functional working prototype to present. Preliminary testing has begun on each individual component, to ensure the team understands how those sub-systems work individually before trying to tie them all together.
One of the team members has made great strides testing a Visual SLAM algorithm with a single camera on Jetson Nano. Although a single camera was used in these tests, increasing the number of cameras will increase the accuracy of the data and hence, also the algorithm. Based on the knowledge that we will be able to use this flight computer for our project, we have gone ahead and ordered a Jetson Orin Nano for ourselves, our first official purchase! We are starting to move past the research stage and want to get some hands-on testing with the parts we will be using. We are aware that the task at hand is not simple, so preliminary testing and ordering parts early will be essential for us to meet key expectations by the deadlines. We are putting together the prototype over the next few days and recording videos to show at PID. The team is eager to keep working on the drone together and get it up and running!