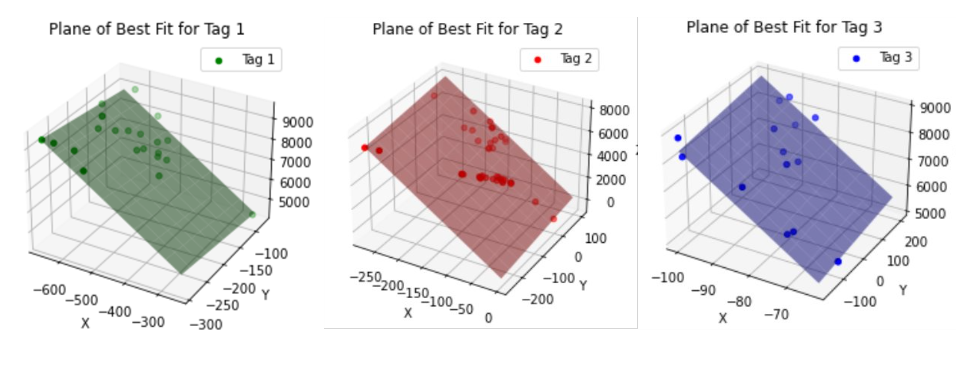
This week, we’ve made quite a bit of progress in integrating our object detection and 3D tagging algorithm with our angle calculation feature. Our project relies on tracking individual antennas, and assigning points as belonging to one antenna or another, in order to then draw a plane of best fit through the points for each antenna, and gathering a series of estimates to average into one conclusion about the orientation of the antenna.
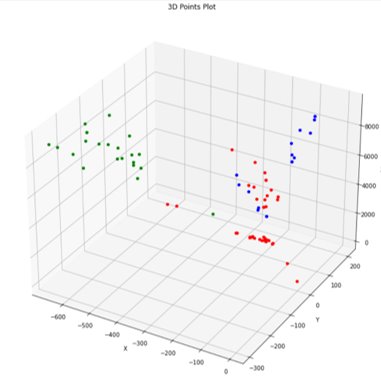
You may notice that the pointclouds do not currently resemble antennas. This is because we still need to fine-tune the margin around the bounding box with regards to what points to consider to be part of the antenna.
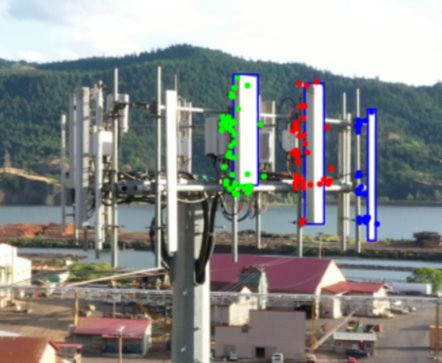
We anticipate that many of the keypoints we will use to detect the antenna position will be around the edges of the antenna, as the central portion of the antenna is a consistent texture and appearance, which is difficult for keypoint detection to use. So to ensure that we are getting all the keypoints we can, we need to add a slight margin around the bounding box that will still consider those points to be part of the antenna. That way, even if the bounding box is slightly too small, or barely excludes an edge, we will not miss out on data.
The drawback of this is the results above. With a margin that’s too large, the algorithm will include keypoints for the tower behind the antenna, which throw off our results.
Although it still needs improvement, this integration is nonetheless a marker of significant progress, and brings us one step closer to a complete pipeline.