This week, Gatormatix began to wrap up the first semester of IPPD by presenting our SLDR.The presentation went well, and positive feedback was achieved. The team also got to listen to two other presentations. Following this, the team sent out the SLDR response memo. As we move into the last few weeks of the semester, testing will continue, with stability and FEA analyses driving design changes.
This week, Gatormatix presented their SLDR under the viewing of peers. The presentation went very well, and each team member is looking forward to incorporating the feedback received for the upcoming event.
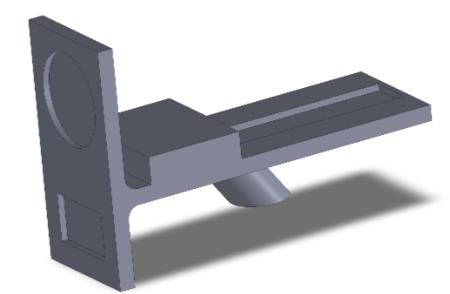
The drone mount has undergone major changes and has reached iteration three, in which the idea is to have the mount above the drone to prevent obstruction of the LiDAR FOV. This is something that is currently being investigated and decided upon. The drone itself has had discussions of being reduced to a quad-copter for efficiency purposes– math pending confirmation.
A few key components of our drone have arrived and testing began immediately. The visual SLAM algorithm is still undergoing testing and iteration.
The project is on track, and the team is looking forward to another week of hard work and progress.
This week, Gatormatix has focused on drafting and further completing the SLDR in preparation for the presentation on Tuesday. Each team member has begun work on their respective parts and progress is continuing steadily.
A few changes have been made to some core components of the drone. First, the LiDAR configuration originally chosen was replaced with a newer, 3D point cloud LiDAR. The team is very excited to work with this component due to its great capabilities. Furthermore, the flight controller is being revisited, due to a sharp increase in price of the previously selected one. This is a decision that is ongoing.
Visual SLAM algorithm testing is underway, and will be implemented in full with the arrival of LiDAR. This progress is concurrent with hardware upgrades such as the frame of the drone and the mount. CAD models are being constructed and stress analyses will ensue to ensure the drone is proper. The team is very excited to get hands-on testing with components that are arriving soon.
The project is on track, and the team is looking forward to another week of hard work and progress.
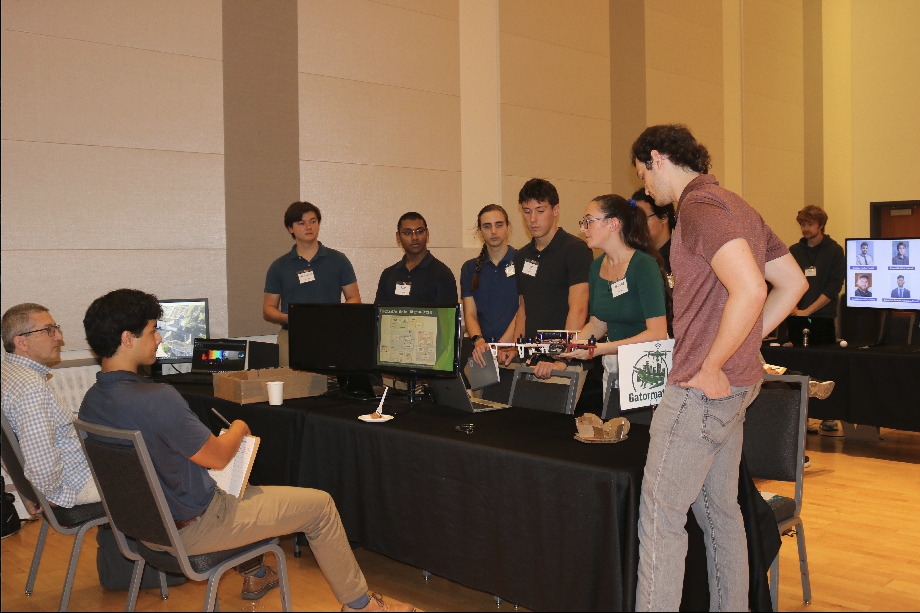
This week, Gatormatix presented their prototype at Prototype Inspect Day (PID)! We as a team received very valuable feedback from all the judges during our presentations. Showing off our drone body as well as the different subsystems of our drone platform was very insightful to not only us but also to the people around us. Our project complexity has made it essential for our multifaceted team to split up into different groups, with software and hardware teams. Although we still very much work together, seeing our project come together was extremely interesting and a good checkup for moving forward.
Most of the criticism received during PID were suggesting on how we should navigate our project. Practically all the judges had expertise in mechanical (or related) field, so most of the feedback received was along those lines. We have a few notable actions we are planning to take moving forward based on feedback. First of all, we were recommended to simplify the project as much as possible and start ordering parts soon. Although our project is very complex, testing subsystems is going to be crucial to understanding how parts work, and ordering parts will be necessary for testing. We are also going to make a CAD model of our prototype, as it will be necessary for SLDR, and it will be good for testing and presenting. The next significant research items will be cameras and LiDAR. We want to find the right type of camera for our use case, and we are under the impression that 2D LiDAR might not be powerful enough to solve our problem. We are all doing extensive research on the topic to gain enough proof.
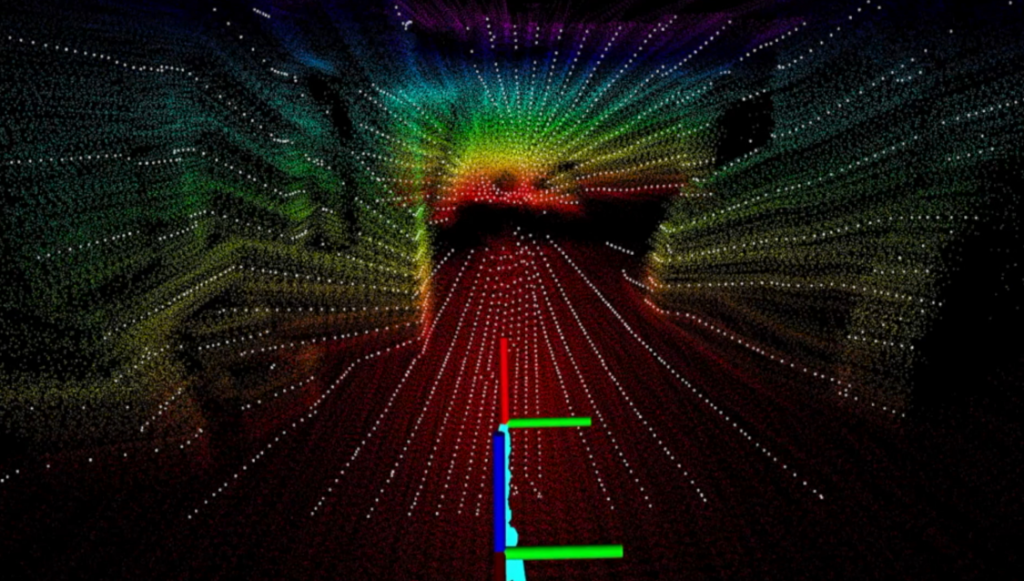
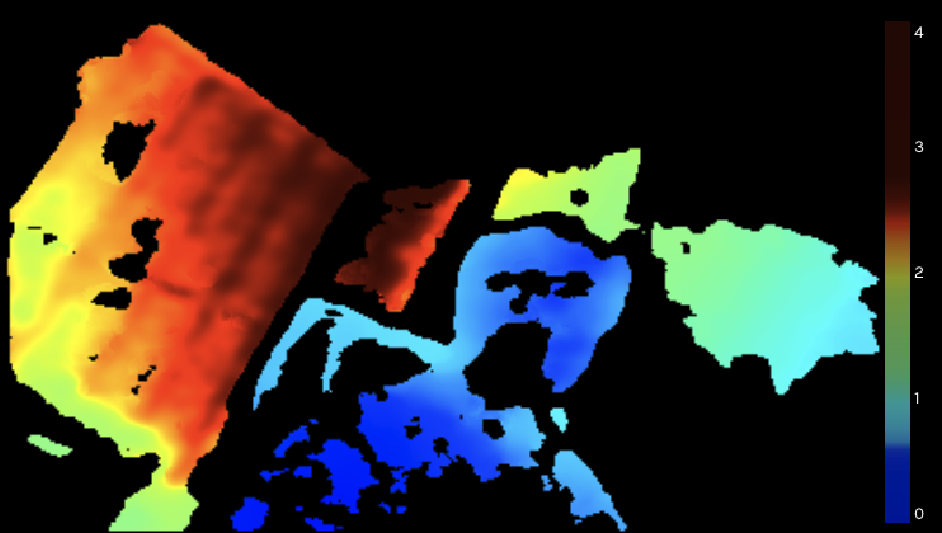
Great testing has been done for our prototype presentation. A SLAM demonstration was shown at PID which was valuable for judges to understand what exactly it is. A LiDAR sensor was set up with live feedback to its software outlining the box it was in perfectly. A cardboard example of the sensor platform was also created for us to have a better understanding of how we are going to assemble the sensors in order to make our project fly! Overall, great progress has been made, and we look forward to another week of working together!
This week, Gatormatix has been focusing on getting ready to present for Prototype Inspection Day (PID) on Tuesday. Getting our hands on a drone body, LiDAR, and other hardware components has given us the ability to have a semi-functional working prototype to present. Preliminary testing has begun on each individual component, to ensure the team understands how those sub-systems work individually before trying to tie them all together.
One of the team members has made great strides testing a Visual SLAM algorithm with a single camera on Jetson Nano. Although a single camera was used in these tests, increasing the number of cameras will increase the accuracy of the data and hence, also the algorithm. Based on the knowledge that we will be able to use this flight computer for our project, we have gone ahead and ordered a Jetson Orin Nano for ourselves, our first official purchase! We are starting to move past the research stage and want to get some hands-on testing with the parts we will be using. We are aware that the task at hand is not simple, so preliminary testing and ordering parts early will be essential for us to meet key expectations by the deadlines. We are putting together the prototype over the next few days and recording videos to show at PID. The team is eager to keep working on the drone together and get it up and running!
This week, Gatormatix had our official PDR presentation with our sponsoring engineers. It went very well, and our liaisons provided valuable feedback and gave extra direction on aspects of the project like how our drone should communicate with ground control and emphasized a focus on solid data collection over extensive processing. We will be sure to incorporate this feedback so that our final product will be as successful as possible.
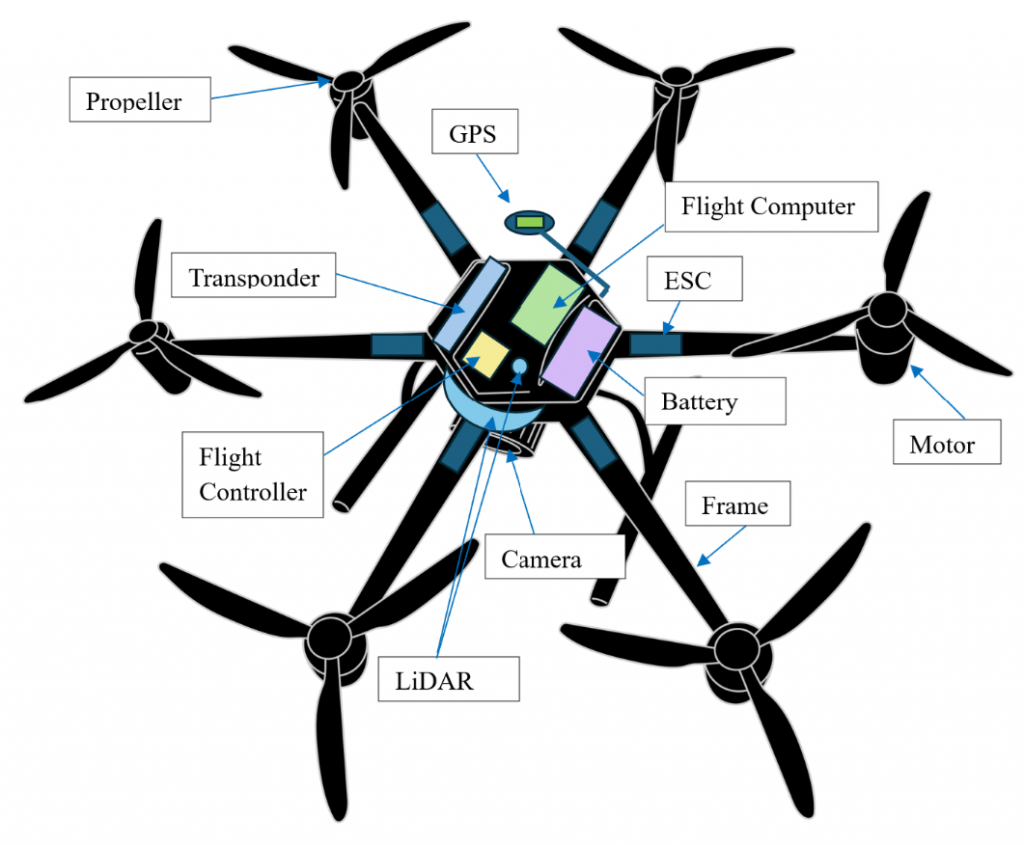
We’ve also made rapid progress on various aspects of our preliminary prototype. Thanks to one of our member’s connection with a drone lab on campus, we’ve been able to borrow a hexacopter drone frame which we can use to verify our initial design assumptions and familiarize ourselves with the process of drone construction. We also received a RPLiDAR sensor, which we’ve been able to interface and collect data from. Finally, we’ve verified the successful function of a popular SLAM algorithm, ORB-SLAM3, on a Jetson Orin Nano with an example dataset. As we plan to use this for our flight computer to control drone mapping and navigation, this is a promising development towards real time mapping and navigation. Now that our PDR is complete, we are pivoting to focus fully on prototyping and the verification of individual sensors ahead of final integration.
This week, Gatormatix met and determined an improved plan for developing our sensing system. Our original vision was a little hazy and involved working on the sensing, mapping, and drone hardware one after the other, but upon reconsidering the needs of our sponsors, we have decided to focus our development around two parallel and independently-functional paths: Developing the drone hardware itself and creating a handheld “rig” that will allow for fine tuning our sensor setup and mapping pipeline without needing to wait for the drone itself to be functional. Similarly, the drone prototype will be constructed with weight ranges in mind for the sensing components but will not have to wait for the rig to be completed.
By dividing the work along these boundaries, we hope to enable more rapid development and let our team members work within their specializations – our mechanical and aerospace engineers can focus on making sure the drone can easily fly and maneuver, the electrical and computer engineers can focus on interfacing the various components, and our computer scientists can select and refine our sensing algorithms. In this way, we hope to rapidly improve on our design and manage the complexity of integrating a project of this nature. We have updated our PDR to reflect this new approach and will present it for sponsor approval within the coming week.
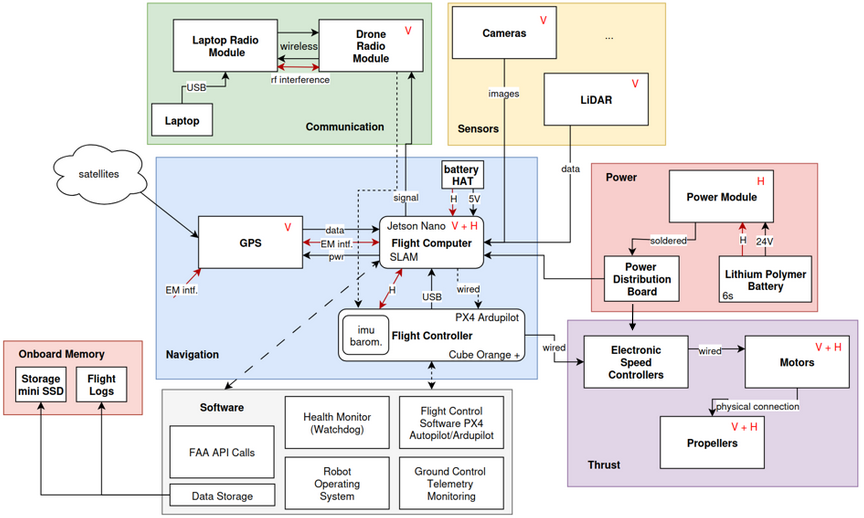
Gatormatix presented the first iteration of our PDR this week! We received valuable feedback about both the content of our presentation and our manner in presenting it, which we will be sure to implement ahead of our real presentation to our sponsor engineers. Above, you can see the system architecture diagram that the team put together for the presentation! The official presentation is coming soon, and we are hunkering down to get it in the best possible shape by then.
We have also been continuing with research for the drone itself as well as the imaging and mapping algorithms that it will be using. On the drone hardware side, we are getting closer to a finalized Bill of Materials (BOM) for our original drone prototype, which we hope to start ordering parts for soon so that we can begin building and testing. On the software side, we have been doing further research into the state of the art of Simultaneous Localization and Mapping (SLAM) algorithms and have found some promising recent techniques that combine LiDAR and RBG camera imagery to create an accurate and stable 3D map. It is possible that these could even be used for the 3D scans that our project will ultimately be taking instead of just aiding in autonomous navigation. The vision for our project is really starting to come together, and we are excited to see how far we can take it in the coming weeks!
Gatormatix has been working on their preliminary design architecture, making great strides towards a prototype goal in preparation for the Preliminary Design Review Peer review coming up next week. During the research process, the team was able to home in on some good solutions for systems they will need to design and integrate together onto the drone platform. Further research is required to understand how this integration will happen, especially depending on which hardware pieces we select.
They are committed to prototyping quickly, breaking things, and trying again, as it will provide them with a baseline platform to design and test their sensors on before next semester. This is most likely going to be the most challenging portion of their project. 3D modeling and navigation is no joke, and there are many small details such as safety and reliability of the base platform that need to be flushed out before a final design is created next semester. Back to work!
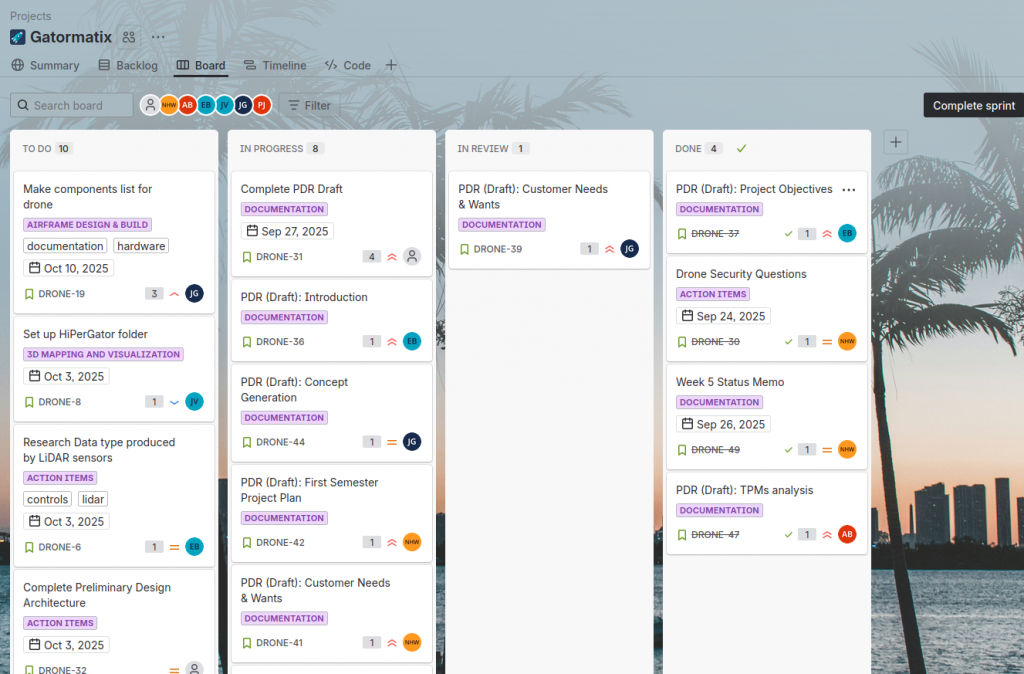
As our project gets more complex, we need to become better at managing our tasks and assignments. As such, the team has begun filling out tasks for each other, allowing them to become much more efficient and independent in their work. The team has developed an initial draft of the Preliminary Design Review, and has also been brainstorming about different technologies that can be used in the scope of UF regulations. Looking forward, the team is planning to design the overall system architecture for their drone platform, describing parts and functionality, as it will allow them to break the project into multiple smaller achievable pieces. As the team is following an Agile development approach, they seek to having a working ‘prototype’ with added value at the end of each of their 2 week sprints. The team is very excited to begin work on this prototype to be showcased in a couple of months!