The team made solid progress this week across both the vision and mechanical subsystems, with a particular focus on advancing verification capabilities and preparing for further integration of the wire insertion assembly. Several parallel efforts came together to strengthen the foundation for upcoming testing and refinement.
On the vision side, we continued developing the distal and proximal tip detection algorithms and made meaningful improvements to their performance. In support of this work, we reprinted the full vision verification setup, this time including the external enclosure. This updated build will allow us to better control lighting, camera placement, and part alignment, which are all critical factors for consistent image capture and reliable algorithm evaluation. In parallel, we formally defined the complete set of vision requirements for the system, including pixel size, sensor format, resolution, aperture, and lens specifications. Establishing these parameters provides clear constraints for both hardware selection and future software tuning.
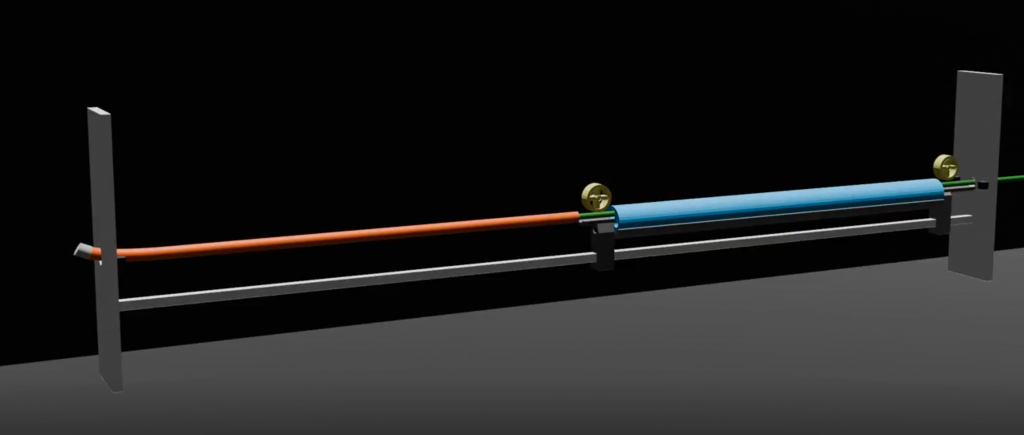
Mechanical progress focused on preparing for additional automation of the wire insertion assembly. We ordered key components including a timing belt, stepper motor, motor driver, shaft collars, and bearings. These parts will enable initial motorized testing and help us assess performance, alignment, and control strategies before committing to a finalized configuration.
The team also presented current project progress during QRB1 and received valuable feedback on both the technical direction and overall system approach. The discussion helped validate recent design decisions and highlighted areas for continued refinement as the project moves forward.
Looking ahead, the team will focus on finalizing the distal and proximal tip vision algorithms once additional image data is collected using the updated verification box. We will assemble and test the newly printed vision verification setup, integrate the recently ordered components into the wire insertion assembly, and design and fabricate additional custom parts as needed based on evaluation of these components. In parallel, we will continue exploring external motorized solutions for vision verification lens adjustment while also assessing whether a commercially available all-in-one camera and lens solution could meet system requirements.
A few action items remain for coordination with the liaison engineers, including sharing the Python script needed for camera API integration, providing additional images of passing catheters to support algorithm development, and completing the When2Meet poll for the upcoming March trip.
Overall, the project remains on schedule, and the progress made this week positions the team well for continued integration and testing in the coming phases.
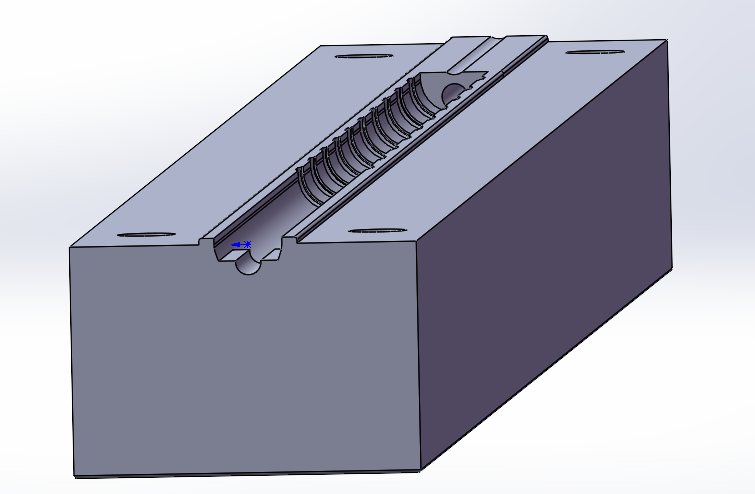
Here is an image of our CV testing browser: