This week brought productive work sessions and liaison discussions, creating a clearer sense of direction as the team moves into the testing phase. With most of our ordered parts finally arriving (procurement can be slow!), we’re transitioning from design and printing into hands-on assembly and evaluation.
On the computer vision side, we presented our latest proximal tip detection work to the liaisons. Right now we’re using color-based HSV masking in OpenCV to identify the copper wire and SAS sensor from images of the proximal end. We discussed recommendations for moving toward object recognition or pixel classification rather than relying solely on color, and designing a physical guide to separate the wires so they’re easier to distinguish in images. The proximal tip is the most critical orientation check since it connects to the rest of the catheter, so getting this right is a top priority.
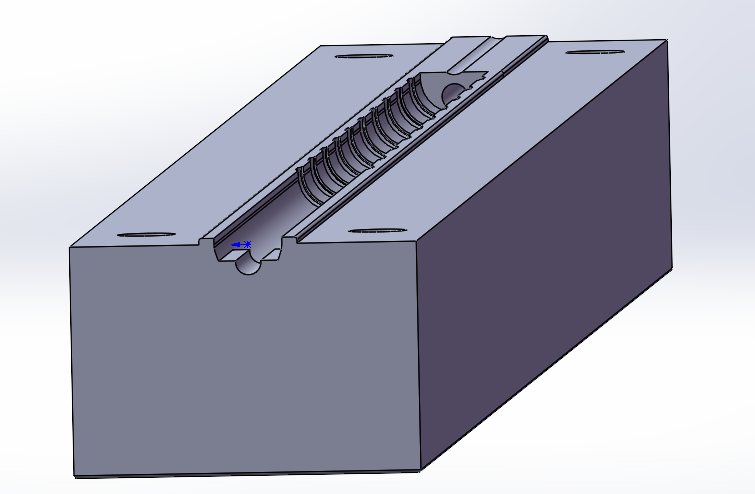
The mechanical wire insertion sub-assembly also got a detailed walkthrough. A motor-driven wheel mechanism for pushing the wire was developed using bevel gears to redirect motion along Z and Y axes. A clever ramp system lifts the wheel over the lumen instead of needing our original servo-based approach, saving valuable space.

The vision verification box is approaching its near-final form. The software can now automatically configure camera exposure and gain before capturing. The liaisons asked us to write up setup instructions so they can replicate the build in their Jacksonville lab and start sending us real images for offline processing.
A big takeaway from the meeting: J&J management’s top priority is de-risking the wire loading mechanism. They want to get our fixtures into the hands of actual lab technicians to evaluate real-world usability — whether the fixture damages the nitinol wire, whether feed speed is appropriate, and what failure modes emerge. We’re also now formally documenting every failure we observe during testing, building a record that tracks what broke, what we fixed, and what still needs attention.
Looking ahead, the pace is picking up, and the team is energized and excited to see months of design work start to come together on the bench.