Team CORBOTICS has continued to focus on design for fixtures, integration of subsystems, and preparation for testing in anticipation of Prototype Inspection Day. During this week, the team worked to improve the reliability and repeatability of our fixtures, verify our process flow, and synchronize efforts between the mechanical, computer vision, and automation subteams.
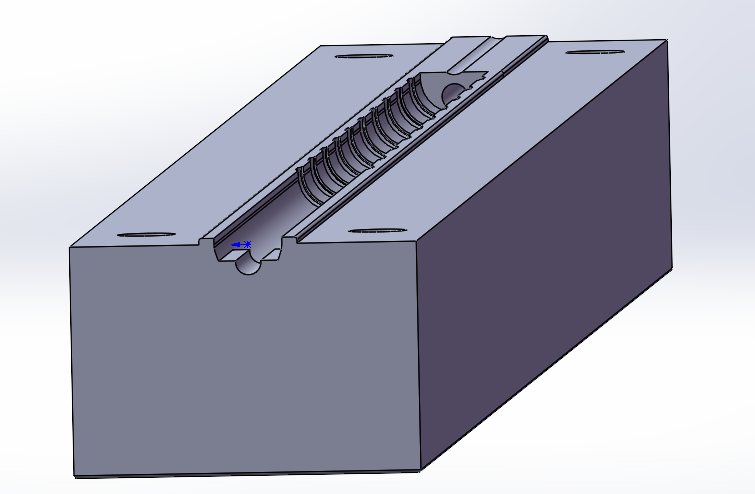
Corrections were made to the lumen holder fixture that positions and secures the catheter lumen during automated assembly, based on feedback from our liaison at Johnson & Johnson’s Biosense Webster division. The fixture’s wall height was increased to provide additional lateral support and further prevent misalignment during testing. The fixture’s reliability and repeatability were the target mechanical properties, as these are necessary for a successful automation process.
Mid-week, some team members made a field trip to a robotics team in Lakeland to learn more about their automation setup. They were able to experiment with parts, test various mechanical interfaces, and brainstorm potential design solutions that could work with our system. Additionally, they were able to return with some spare parts and material that they were able to salvage and will be used in our prototype build. The team expects this component to push progress forward leading up to Prototype Inspection Day.
For members who were unable to attend the trip in person, those on campus followed up by discussing and sharing photos and notes from the team’s time at the other robotics team. The team’s general knowledge of the potential design elements to make a design simpler or how to re-purpose existing mechanisms has increased.
Our cooking fixture and holding fixture have been modified according to the finalized Process Flow Chart, which details every step of the manual assembly of the catheter. This visual reference has proven useful for determining where the team needs to automate steps and integrating all of the subsystems.
The computer vision subteam has continued to make progress on detection and labeling tools using OpenCV. We have been able to make these corrections to further optimize OpenCV for our fixture changes.
Team CORBOTICS is working toward tightly synchronizing the mechanical fixtures, computer vision tools, and control systems as a complete automation process. The next steps in our preparation are system testing and finalizing our design documentation before inspection.