This week, our team made major progress on the simulation side of the project by spending extensive time working in ANSYS Fluent. We focused heavily on refining our simulation setup, fixing geometry issues, and finalizing a clear workflow that everyone on the team can follow. Much of this work required close collaboration as we debugged problems and ensured our setup was consistent and repeatable.
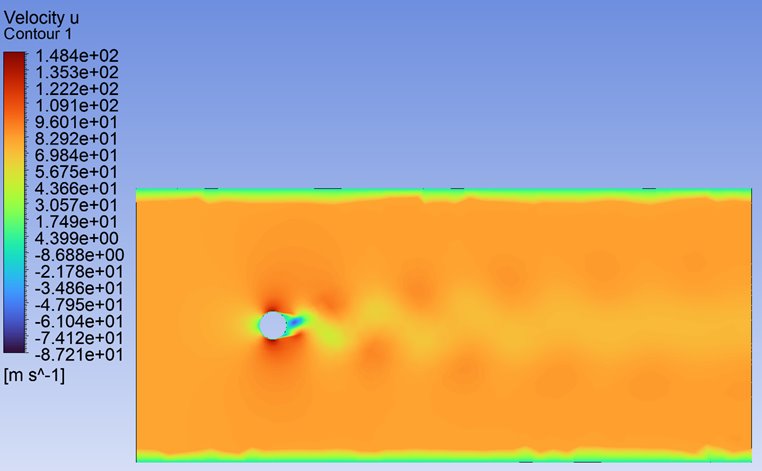
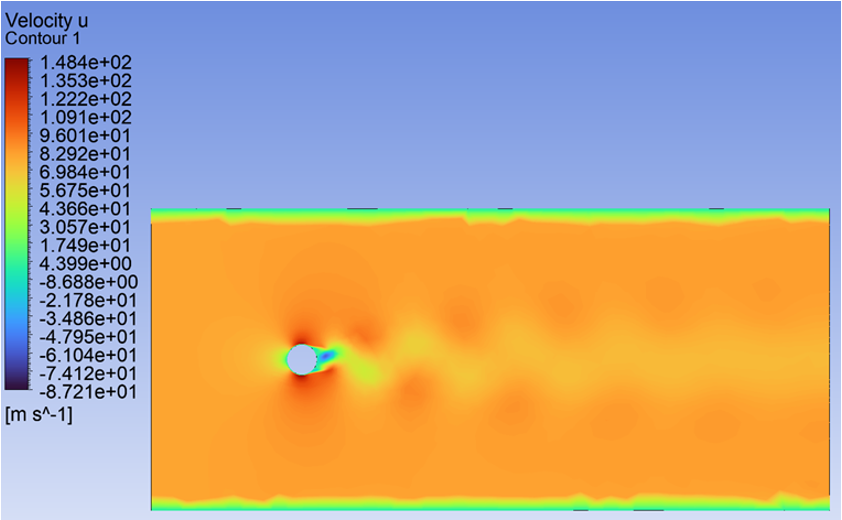
One of our biggest milestones this week was successfully simulating 7,000 m/s, which marked our first complete high-speed case. We are currently finishing up this initial simulation and carefully studying the results, not just looking at the visuals, but understanding what the data actually means and how reliable it is. Learning how long simulations take, how convergence behaves, and how to interpret outputs has been just as important as running the simulations themselves.
A large portion of our effort went into refining the simulation itself. This included improving the geometry, adjusting mesh settings, and validating assumptions to ensure the results were both relevant and physically meaningful. Rather than taking outputs at face value, we’ve been learning how to critically assess whether the data produced by Ansys truly reflects the behavior we expect under extreme conditions.
This week also highlighted one of the realities of computational simulation: patience. High-speed simulations take a long time to run, and when a simulation crashes late in the process, restarting can be frustrating. These challenges have prompted us to think more strategically about computational resources, and we are now exploring moving our simulations to HiPerGator to improve efficiency and reduce runtime.
Overall, this week was a strong step forward. We’re gaining confidence not only in using ANSYS, but in understanding its results and limitations. Each iteration brings us closer to a robust, defensible simulation process, and we’re continuing to build the technical foundation needed to support our design decisions moving forward.
Meanwhile, the prototype team has been quite busy!
Andrew recently built our initial electronic system that comprises an Inertial Measurement Unit (IMU) and thermistors to detect when we are entering reentry, a microcontroller unit (MCU) that will control our system, and a step-down power regulator that steps our 11 V from our battery down to 5 V that our MCU can run on. This was a crucial milestone, as now we are confident that our basic electronic system works, and we can order our servo motors that will deploy the flaps of our design. We look forward to updating you on how we will integrate our servo motors into our electronic design!