This week the Addtronics team did QRB2 (qualification review board 2) where we received some incredibly valuable feedback regarding our project. We presented updates regarding the tests we’ve conducted since the last QRB (summarized in previous blog posts) and stated our findings as well as how the project has shifted due to those results.
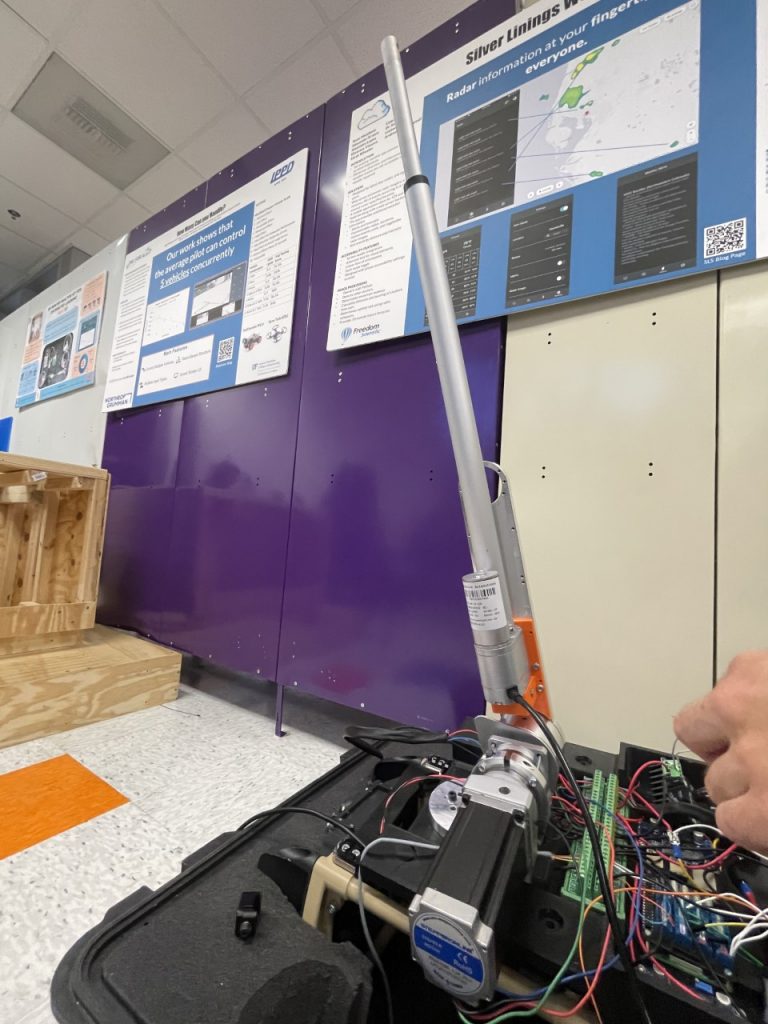
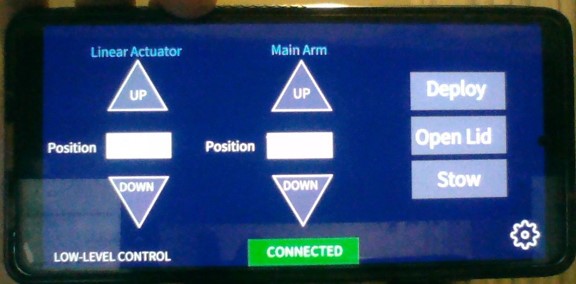
So far, we have updated the GUI, installed a new linear actuator with a longer stroke, installed a new motor that is able to provide more torque, installed a new motor controller to use with the larger motor, and installed level shifters to draw the appropriate amount of current to power the new motors. A motor test has been conducted which preliminarily shows the new linear actuator and motor will be able to lift the lid without needing additional help from the quadruped. Another finding from the motor test has shown the current interface design is too weak to sustain the force produced from lifting the lid.

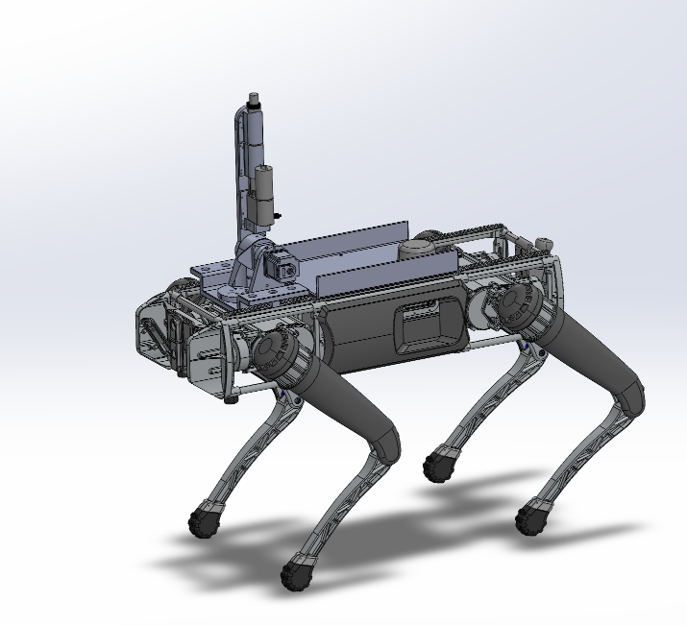
We are currently exploring multiple designs to strengthen the interface so it will not break when lifting the lid and will begin to manufacture them soon. As the interface is being updated, we have also begun moving the electronics onto a perforated crossover board for easy removal from the quadruped while reducing the risk of accidentally damaging the functioning wiring. Once the new interface is installed, we will continue conducting tests to determine the reliability of the interface-arm pair. We are currently focusing on the functionality of the arm as we wait for the front left leg of the quadruped to be repaired. Once the leg has been fixed we will expand our tests to include the quadruped.